
Peer Robotics are revolutionizing material movement in manufacturing and warehousing with Physical AI solutions that work alongside humans workers. Their core focus is to automate the movement of pallets and trolleys with robots that operate seamlessly with existing customer infrastructure. Their flagship platform, the Peer 3000, can handle payloads up to 3,000 pounds and uses onboard cameras to autonomously navigate and recognize assets.
"At Peer Robotics, we are solving the labor shortage crisis that our manufacturing and warehousing is facing today by building material movement solutions,” said Vishrut Kaushik, Senior Robotics Engineer at Peer Robotics. “Our focus specifically is on automating movement of pallets and trolleys with collaborative mobile robots that are easy to use and they work with existing customer infrastructure and operations."
To successfully navigate warehouses and interact with varied payloads like worn-out or stretch-wrapped pallets, Peer Robotics’ systems employ a combination of sensory inputs. While traditional sensors like LiDAR are excellent for deterministic safety features and emergency braking, computer vision provides the nuanced context needed for advanced operations. Vision models allow the robots to evaluate their environments, dynamically orient themselves to dock with pallets, and seamlessly handle complex visual edge cases that mimic human intuition.
"Computer vision goes beyond just providing raw data and it gives us context. It tells us how objects are interacting with each other within a dynamic environment,” said Vishrut. “Ultimately, our goal is to leverage the scalability of vision to build systems that are truly perceptive and can seamlessly work alongside humans."
Furthermore, integrating computer vision opens up entirely new possibilities for Peer Robotics’ AMRs beyond basic material movement. As these robots move through facilities, their onboard cameras can gather additional operational intelligence, such as determining if a pallet is fully loaded or empty before attempting to move it. It also paves the way for facility-wide monitoring, allowing the robots to identify safety hazards like fallen boxes or flag damaged goods.
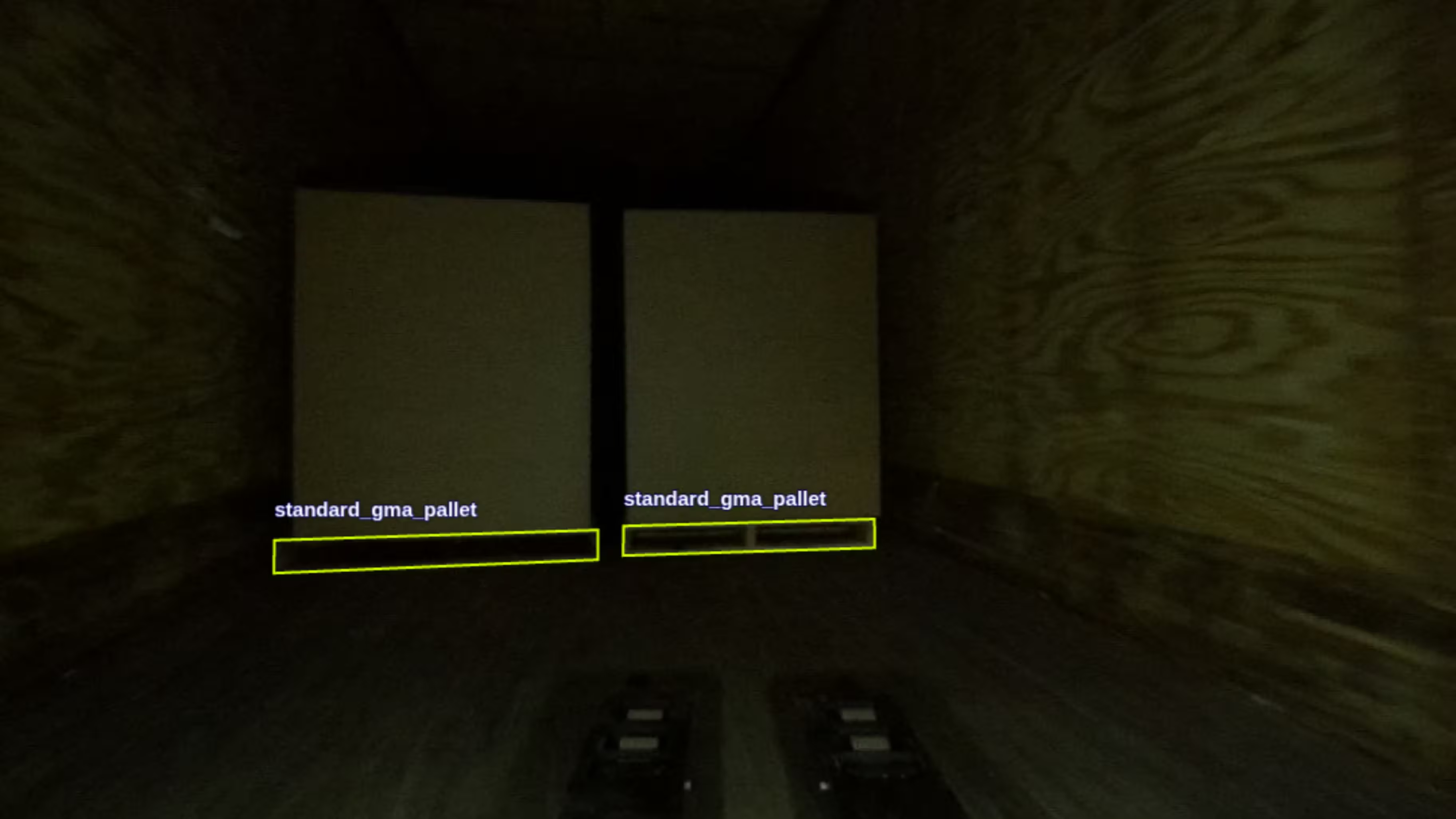
To give their AMRs this contextual awareness, Peer Robotics trains custom computer vision models to identify and interact with customer assets, like pallets and trolleys, allowing the robot to dock into them with high precision. To ensure these models perform well in unpredictable real-world environments, Peer Robotics uses Roboflow to manage their training data, handle image annotation, and train their custom models in the cloud.
"For our initial pallet detection model, we staged six or seven pallets in various orientations across our facility to capture a diverse dataset. I gathered about 200 to 300 images and annotated them using Roboflow,” explained Vishrut. “That allowed us to validate the approach and get our first model up and running in the same week."
Because warehouse environments are highly unstructured, a static computer vision model can struggle with edge cases it hasn't seen before. To alleviate this, Peer Robotics relies on an active learning loop. When a robot fails to detect an asset in the field, a parallel data collection system on the robot captures a sample of the edge case. This data is automatically uploaded via API to Roboflow, where it is fed back into the training pipeline to continuously fine-tune the model.
"Our goal is to engineer human-like intuition into our models. Capturing real-world edge cases is critical because it allows the robot to learn and adapt to complex, dynamic environments,” said Vishrut. “Ultimately, this is how autonomous robots will achieve mainstream adoption, by reliably solving the unpredictable challenges that humans handle intuitively."
Continuous improvement is essential for computer vision to be successful in real-world deployments. Warehouses and manufacturing facilities are incredibly diverse, featuring different layouts, broken floors, and uneven lighting conditions. Rather than forcing customers to renovate their spaces or create perfectly structured environments just for the robot, the AMRs must adapt to the existing infrastructure. Fine-tuning models on real-world data allows the robots to reliably navigate unique situations that they may have never encountered during their initial training.
Vishrut explained how continuous improvement allows them to deploy and adapt to new environments quickly: "When we encounter novel edge cases, we leverage our existing models to accelerate annotation directly within Roboflow. Today, when rolling out to a new facility or adapting to a challenging scenario, we can upload new images, review the annotations, and deploy a fine-tuned model back to their facility within a day."
Peer Robotics leverages robotic innovation to alleviate the physical demands placed on workers, and to bring the future of manufacturing into the present. They aim to create a future where robots and humans collaborate seamlessly. Their technology is designed to take on monotonous tasks, freeing human hands and minds to focus on innovation and problem-solving. By doing so, we aim to unlock a new era of manufacturing efficiency and creativity, where the potential of human ingenuity is fully realized.


